


Projeto que integra a colaboração de homem e robô é premiado em desafio mundial

Segundo o estudante, o objetivo do trabalho, que foi desenvolvido sob a orientação do professor Glauco Augusto de Paula Caurin, vinculado ao Departamento de Engenharia Mecânica da EESC, foi contribuir para a evolução tecnológica nos próximos anos a fim de que as máquinas não substituam a mão de obra humana, mas sim que utilizem suas força e rapidez para interagir com a inteligência de trabalhadores humanos.
Como parte do desafio, a Toradex, que é responsável pela fabricação de um microcomputador em módulo – um hardware utilizado em sistemas embarcados com menos funções, porém especificas e rápidas –, impôs que os participantes incluíssem o hardware dela como componente principal dos projetos. Após a avaliação e o julgamento criterioso da organização, os selecionados receberam o microcomputador em módulo e iniciaram os trabalhos em laboratório.
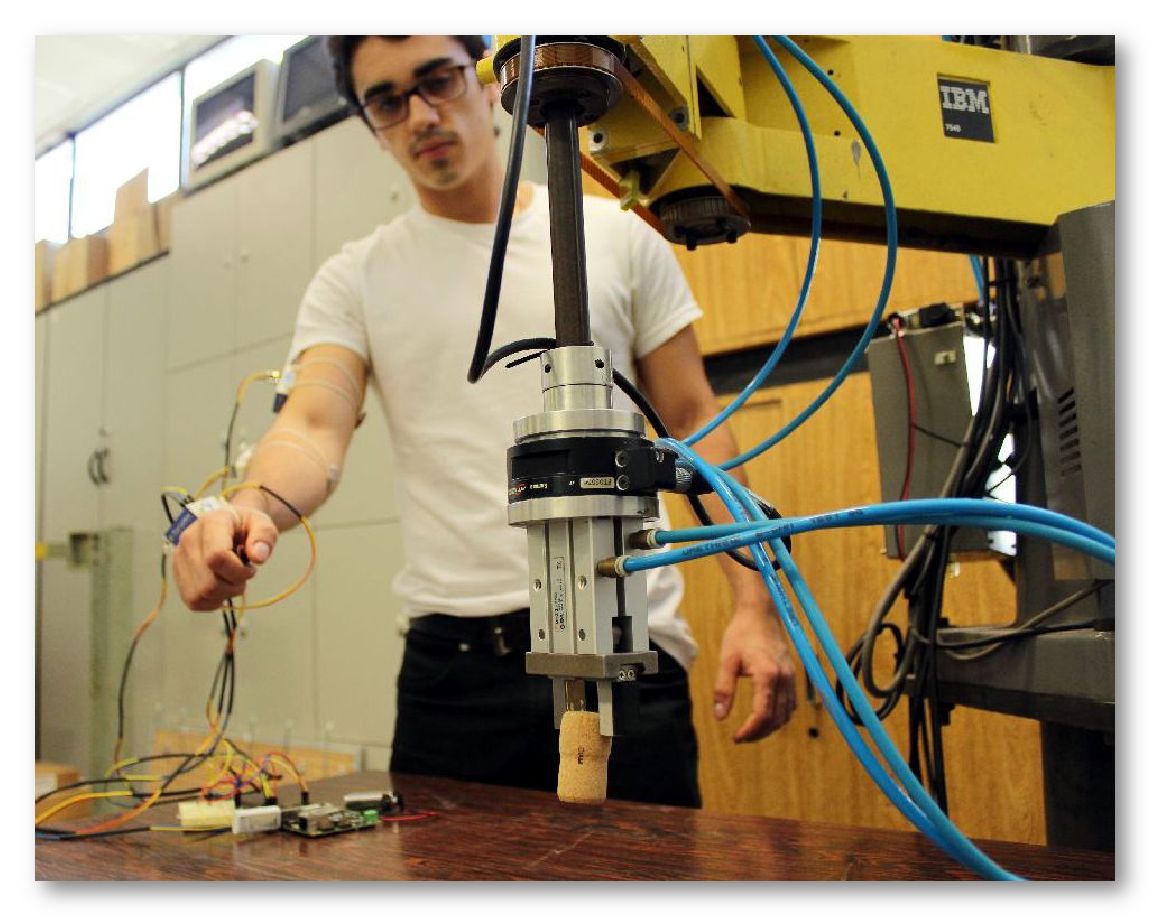
O projeto basicamente consiste de três sensores que são fixados no braço, antebraço e na mão do operador com a finalidade de captar os movimentos de cada articulação: ombro, cotovelo e punho. Os dados lidos pelos sensores seguem para o hardware central que, por sua vez, envia através de rede sem fio as informações para um computador interligado ao braço mecânico, que repete os movimentos. Todo esse processo ocorre em milésimos de segundos, fazendo com que o robô reaja instantaneamente aos gestos humanos. “Através de uma programação no sistema embarcado é possível que o movimento da mão gere um posicionamento que se traduza em um movimento para o robô”, explicou o estudante. Além disso, o sistema permite que os movimentos sejam gravados e desempenhados repetitivamente pela máquina.
O formato tecnológico desenvolvido pelo estudante tem maior visibilidade de aplicação em linhas de montagem de grandes peças ou com agilidade de produção, como visto em indústrias automobilísticas ou aeronáuticas. “Hoje o que se faz é personalizar o robô através de uma programação específica, em que o programador aprende a linguagem e escreve um código, o qual irá ordenar suas operações”, explicou.
Além disso, segundo o estudante, com o aperfeiçoamento dos sistemas, usuários de vários perfis poderão operar os robôs. “Meu desejo é que esta tecnologia elimine toda a parte complexa de programação e permita que uma pessoa sem muito conhecimento técnico controle a máquina a partir de seus movimentos”, definiu.
O projeto foi desenvolvido no prazo de 18 meses e durante esse período o aluno superou diversos desafios com contribuição de seu orientador, como por exemplo, desenvolver a programação do hardware e realizar diversas pesquisas que iam além do conhecimento aprendido em sala de aula e em conversas com especialistas. “O professor Caurin tem muito conhecimento; o apoio não foi somente na orientação do projeto, mas na indicação de contatos que pudessem me ajudar no trabalho”, agradeceu Fernandes.
Além disso, durante os meses de trabalho foi exigido que os participantes inserissem na página on-line do desafio, no formato de um blog, notícias e novidades do desenvolvimento do projeto, além de um vídeo autoral exibindo as informações técnicas e os objetivos do sistema e do mecanismo. O desejo dos organizadores do ‘challenge’ foi criar nos internautas curiosidade e interesse nas peculiaridades do trabalho e também avaliar a capacidade dos participantes e o alcance de visibilidade do público nas redes sociais e outras mídias. “Isso me ajudou bastante a aperfeiçoar a apresentação do projeto”, explicou.
{youtube}geRVtBy_MFA{/youtube}
Segundo Fernandes, as motivações que o levaram a desenvolver o projeto, que foi tema também do seu Trabalho de Conclusão de Curso, foram o contato anterior com outros trabalhos de Caurin na área de reabilitação robótica para fisioterapia, a manipulação de braços robóticos e também o fato de ter realizado um intercâmbio na Universidade de Nova Iorque, no qual trabalhou em um laboratório que desenvolvia pesquisas com interfaces intuitivas desde aplicativos para tablets e celulares até roupas inteligentes, a fim de agregar algum tipo de tecnologia no dia a dia. “Meu motivo principal na engenharia sempre foi esconder do usuário a parte complexa e lhe dar a parte simples”, enfatizou o estudante.
O professor comentou que o desafio foi um grande trabalho de extensão, pois ofereceu um nível de dificuldade que envolveu diversas tecnologias, dando a oportunidade ao aluno de aprender além das disciplinas de sala de aula, enquanto buscava soluções para as problemáticas. Ele ainda destacou que a orientação consistiu em ajudar o estudante no direcionamento das tecnologias úteis, em vez daquelas que apenas sobrecarregam o trabalho. “Estou muito contente, pois o Vinicius tomou o caminho certo e provou que tem muita competência para superar diversos concorrentes mundiais e grandes desafios. Isto mostra o quanto nossos alunos da EESC podem ser competitivos globalmente”, destacou o docente.
Caurin salientou que os robôs colaborativos (collaborative robot – CoBot) são uma nova geração de máquinas que está chegando não apenas para as indústrias, mas também para aplicações na medicina, saúde de reabilitação ou até em atividades comerciais e residências. “Isso com certeza irá mudar o que conhecemos e usamos de interatividade robótica”. Porém, o professor ainda completou: “A discussão é de que forma essas tecnologias irão chegar para o usuário e para as indústrias daqui a aproximadamente dois anos e também qual será o ganho de competitividade que irão proporcionar”, concluiu.
A premiação do Toradex Design Challenge ocorreu no dia 18 de maio, na sede Agência USP de Inovação, em São Paulo, na qual o aluno recebeu, além do certificado do segundo melhor trabalho, o prêmio de USD 10 mil.
Por Keite Marques da Assessoria de Comunicação da EESC
Fotos: Arquivo pessoal/ Keite Marques
{gallery cols=4}/noticias/2015/toradex/galeria{/gallery}