



Engenharia de Materiais: Trabalho de grupo de pesquisa recebe prêmio em congresso internacional
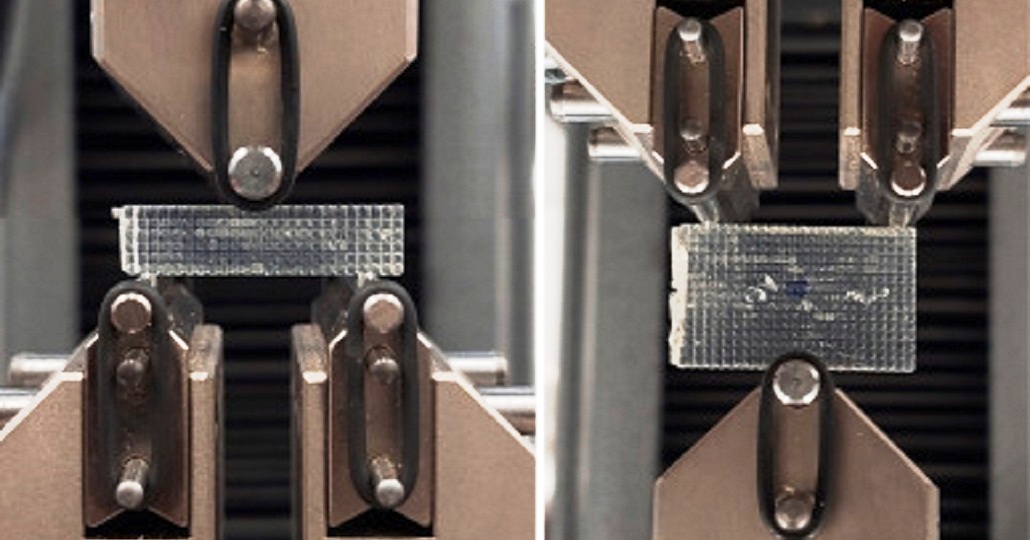
O professor Rafael Salomão apresentou o artigo "Comportamento de concretos refratários nanoligados frente ao alumínio líquido".


OS PESQUISADORES E AS ÁREAS DE ATUAÇÃO
Os docentes da EESC - todos com nível mínimo de doutor - atuam em diferentes linhas de pesquisa da Engenharia, com alto índice de produtividade científica.

TRADIÇÃO EM ENSINO, PESQUISA E EXTENSÃO
Criada em 1953, a EESC é uma das cinco maiores unidades da Universidade de São Paulo, instituição pública de referência e bem classificada nos principais rankings internacionais.

INOVAÇÃO TECNOLÓGICA E EMPREENDEDORISMO
Programas, disciplinas, eventos e parcerias com empresas impulsionam o empreendedorismo e a inovação. O Centro EESCIn é um agente facilitador nesse processo transversal.
Área total (m2)
Edificações
Número de docentes
Funcionários Técnico-Administrativos
Departamentos
Cursos de Graduação
Alunos ativos de Graduação
Programas Strictu Sensu
Alunos ativos de Pós-Graduação
Títulos de Mestrado e Doutorado



